

更新最频繁的一集,我靠这篇累死我。环境为Ubuntu 22.04.5,PX4 1.16.0,Gazebo Sim 8 (Harmonic)。本文xml含量极高。
worlds添加与配置
PX4自带的世界都在clone仓库的路径里:~/PX4-Autopilot/Tools/simulation/gz/worlds,px4启动时默认的世界就是default.sdf。这里以baylands.sdf为例:
<sdf version='1.9'>
<world name='baylands'>
<physics type="ode">
<max_step_size>0.004</max_step_size>
<real_time_factor>1.0</real_time_factor>
<real_time_update_rate>250</real_time_update_rate>
</physics>
<gravity>0 0 -9.8</gravity>
<magnetic_field>6e-06 2.3e-05 -4.2e-05</magnetic_field>
<atmosphere type='adiabatic'/>
<scene>
<ambient>0.8 0.5 1</ambient>
<grid>false</grid>
<sky>
<clouds>true</clouds>
</sky>
<shadows>1</shadows>
</scene>
<light name='sunUTC' type='directional'>
<pose>0 0 500 0 -0 0</pose>
<cast_shadows>false</cast_shadows>
<intensity>1</intensity>
<direction>0.001 0.625 -0.78</direction>
<diffuse>0.904 0.904 0.904 1</diffuse>
<specular>0.271 0.271 0.271 1</specular>
<attenuation>
<range>2000</range>
<linear>0</linear>
<constant>1</constant>
<quadratic>0</quadratic>
</attenuation>
</light>
<include>
<uri>
https://fuel.gazebosim.org/1.0/OpenRobotics/models/baylands
</uri>
<name>park</name>
<pose>205 155 -1 0 0 0</pose>
</include>
<include>
<uri>
https://fuel.gazebosim.org/1.0/OpenRobotics/models/Coast Water
</uri>
<pose>0 0 -2 0 0 0
<relative_to>park</relative_to>
</pose>
</include>
<spherical_coordinates>
<surface_model>EARTH_WGS84</surface_model>
<world_frame_orientation>ENU</world_frame_orientation>
<latitude_deg>37.412173071650805</latitude_deg>
<longitude_deg>-121.998878727967</longitude_deg>
<elevation>38</elevation>
</spherical_coordinates>
</world>
</sdf>其实能发现一个sdf的结构还是很清晰的,physics标签定义了物理仿真模式和刷新速度等,下面还有重力、磁场、大气、环境、太阳光。中间插入了两个建模,baylands和Coast Water,并且链接到gazebo官方的模型库网站,所以第一次运行这个世界的话,程序会先自动下载需要的模型,保存在隐藏文件夹~/.simulation-gazebo/中。最后的spherical_coordinates标签内则是一些定位信息。这里面的重力、磁场、大气、定位等信息都是仿真飞控需要的,没配置好会导致不允许起飞。
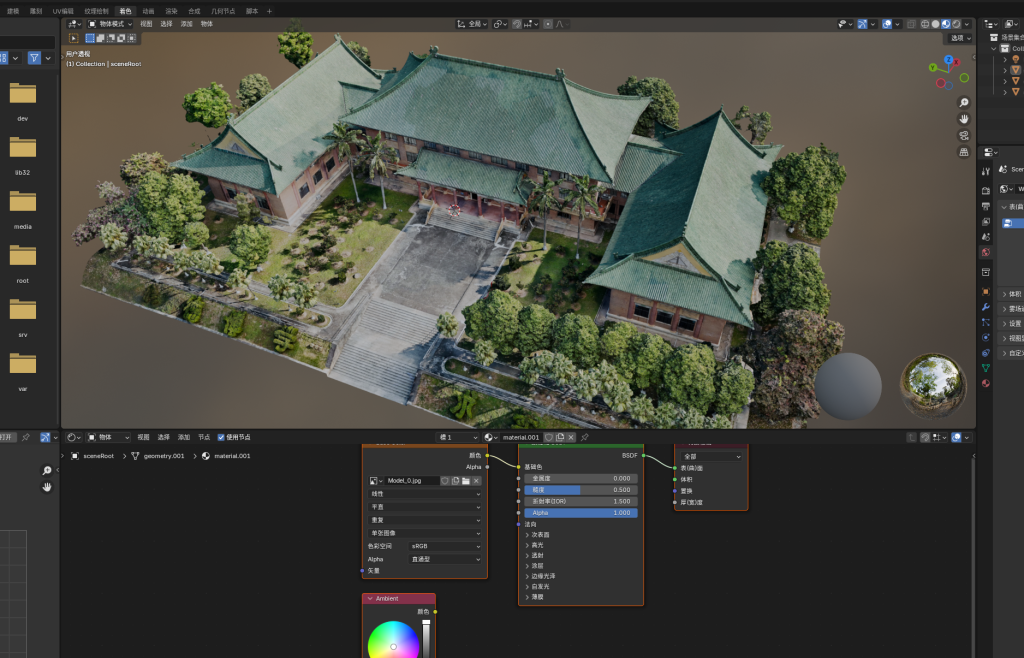
前段时间在学校倾斜摄影了校史馆,模型建出来还不赖,问题来了SCAU为什么不去建酸奶的模。注意自己的模型最好是dae格式,要用blender编辑的话我这用的是长期维护的4.2的最新版。

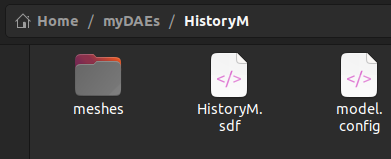
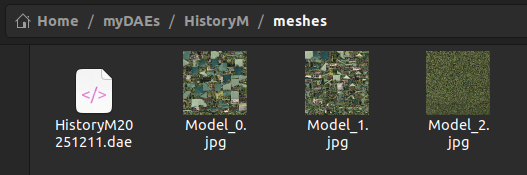
接下来把模型包装成一个本地的gazebo世界。我在home下创建了一个myDAEs的模型根目录,然后在该模型的目录下有三样东西,meshes里面是模型文件以及贴图,另外两个都是必要的配置文件。配置文件和目录的名称要注意匹配一下,具体有什么规定我也忘了()
此处的sdf文件,注意这个sdf和前面那个sdf功能并不一样,这里主要是定义模型和碰撞箱:
<?xml version="1.0" ?>
<sdf version="1.9">
<model name="HistoryM">
<static>true</static>
<link name="link">
<visual name="visual">
<geometry>
<mesh>
<uri>model://HistoryM/meshes/HistoryM20251211.dae</uri>
<scale>1.0 1.0 1.0</scale>
</mesh>
</geometry>
</visual>
<collision name="collision">
<geometry>
<mesh>
<uri>model://HistoryM/meshes/HistoryM20251211.dae</uri>
<scale>1.0 1.0 1.0</scale>
</mesh>
</geometry>
</collision>
</link>
</model>
</sdf>model.config:
<?xml version="1.0"?>
<model>
<name>HistoryM</name>
<version>1.0</version>
<sdf version="1.9">HistoryM.sdf</sdf>
<author>
<name>Evil KT</name>
<email>xxx@163.com</email>
</author>
<description>
SCAU History Museum.
</description>
</model>为什么要配置这么多,问px4和gazebo的人去。接下来要配置环境变量,gedit ~/.bashrc一下,然后把这句加到最后一行,这样以后我自己的世界模型都放在这个文件夹里,gazebo也能直接访问到:
export GZ_SIM_RESOURCE_PATH=$GZ_SIM_RESOURCE_PATH:~/myDAEs再回到PX4的worlds路径中,再创建一个配置文件,我这是HistoryM.sdf,仿照前面baylands写如下内容:
<sdf version='1.9'>
<world name='historyM'>
<physics type="ode">
<max_step_size>0.001</max_step_size>
<real_time_factor>1.0</real_time_factor>
<real_time_update_rate>1000</real_time_update_rate>
</physics>
<gravity>0 0 -9.8</gravity>
<magnetic_field>6e-06 2.3e-05 -4.2e-05</magnetic_field>
<atmosphere type='adiabatic'/>
<scene>
<ambient>0.8 0.5 1</ambient>
<grid>false</grid>
<sky>
<clouds>true</clouds>
</sky>
<shadows>1</shadows>
</scene>
<light name='sunUTC' type='directional'>
<pose>0 0 500 0 -0 0</pose>
<cast_shadows>false</cast_shadows>
<intensity>1</intensity>
<direction>0.001 0.625 -0.78</direction>
<diffuse>0.904 0.904 0.904 1</diffuse>
<specular>0.271 0.271 0.271 1</specular>
<attenuation>
<range>2000</range>
<linear>0</linear>
<constant>1</constant>
<quadratic>0</quadratic>
</attenuation>
</light>
<include>
<uri>model://HistoryM</uri>
<name>HistoryM</name>
<pose>0 0 -2 0 0 0</pose>
</include>
<spherical_coordinates>
<surface_model>EARTH_WGS84</surface_model>
<world_frame_orientation>ENU</world_frame_orientation>
<latitude_deg>23.159806</latitude_deg>
<longitude_deg>113.343986</longitude_deg>
<elevation>30</elevation>
</spherical_coordinates>
</world>
</sdf>注意有几项修改。实验的时候发现在自己的世界下,无人机罗盘会一直找方向一直转,似乎是因为自己的模型比较大,物理刷新没跟上还是怎么,max_step_size改成0.001之后基本就正常了,然后real_time_update_rate改成1000,这两者相乘要等于中间的real_time_factor,这个是相对于现实世界的时间快慢,此处1代表与现实时间流速一致。下面的模型换成自己的,因为设定了环境变量,uri写model://HistoryM就行。定位改到了这个建模的实际位置。
启动仿真,添加一个无人机初始位置参数和一个选world的参数就可以了。这里开的云台相机,话题发布略。
PX4_GZ_MODEL_POSE=-17.7,3.2,1.4,0,0,0 PX4_GZ_WORLD=historyM make px4_sitl gz_x500_gimbal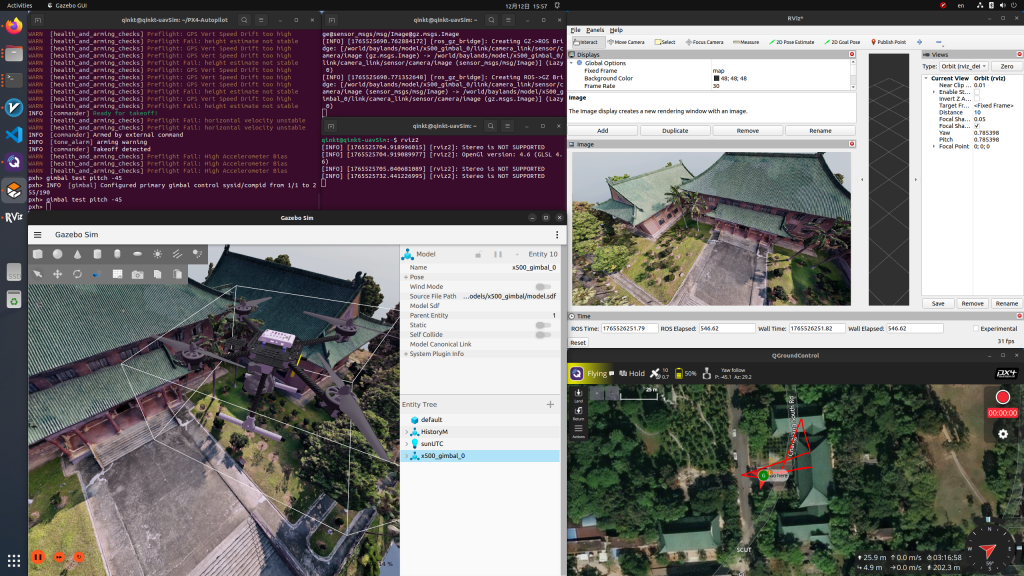
无人机传感器模型配置
跟world类似,无人机相关的模型文件在~/PX4-Autopilot/Tools/simulation/gz/models,并且建模和其他配置文件都放这儿就行,里面有所有自带的机架和各种传感器,基本上仿照着写。不过后面还有个为新无人机注册的流程。
PX4自带的激光雷达只有1d和2d的,也就是一个点或者水平面上一条线。所以我来从lidar_2d_v2的基础上按照livox mid-360激光雷达,改个新的无人机。复制lidar_2d_v2改名livox_mid_360文件夹,修改model.sdf:
<?xml version="1.0" ?>
<sdf version="1.6">
<model name="livox_mid_360">
<link name="lidar_link">
<pose>0 0 0 0 0 0</pose>
<inertial>
<pose>0 0 0.030 0 0 0</pose> <mass>0.265</mass> <inertia>
<ixx>0.00018</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>0.00018</iyy>
<iyz>0</iyz>
<izz>0.00016</izz>
</inertia>
</inertial>
<collision name="collision_box">
<pose>0 0 0.030 0 0 0</pose> <geometry>
<box>
<size>0.065 0.065 0.060</size> </box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<mesh>
<uri>model://livox_mid_360/meshes/livox_mid_360.dae</uri>
</mesh>
</geometry>
</visual>
<sensor name="lidar" type="gpu_lidar">
<pose>0 0 0.09 0 0 0</pose> <ray>
<scan>
<horizontal>
<samples>720</samples> <resolution>1</resolution>
<min_angle>0</min_angle>
<max_angle>6.283185</max_angle> </horizontal>
<vertical>
<samples>64</samples>
<resolution>1</resolution>
<min_angle>-0.122173</min_angle> <max_angle>0.907571</max_angle> </vertical>
</scan>
<range>
<min>0.1</min> <max>70</max> <resolution>0.01</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.02</stddev>
</noise>
</ray>
<always_on>1</always_on>
<update_rate>10</update_rate> <visualize>false</visualize>
</sensor>
</link>
</model>
</sdf>这里稍微改了下碰撞箱,然后sensor标签改成mid360实际的一些参数,还有噪声等等。model.config里面就改改name什么的好了,反正照着给的示例来好啦。
然后仿照x500_lidar_2d的配置,写个x500_livox配置,我主要把激光雷达位置放到了无人机中央,然后顺便把自带的深度相机配置也给塞了进来(喜)。
注册步骤:再来到路径~/PX4-Autopilot/ROMFS/px4fmu_common/init.d-posix/airframes,依旧仿照4013_gz_x500_lidar_2d创建了个4022_gz_x500_livox。再打开CMakeLists.txt,把4022_gz_x500_livox添加到4021无人机的后一位。现在清理掉之前的编译文件,再重新编译启动即可:
make clean
PX4_GZ_MODEL_POSE=-17.7,3.2,1.4,0,0,0 PX4_GZ_WORLD=historyM make px4_sitl gz_x500_livoxgz topic -l查询现有的gz话题,把激光雷达点云、深度相机点云和图像桥接到ROS2:
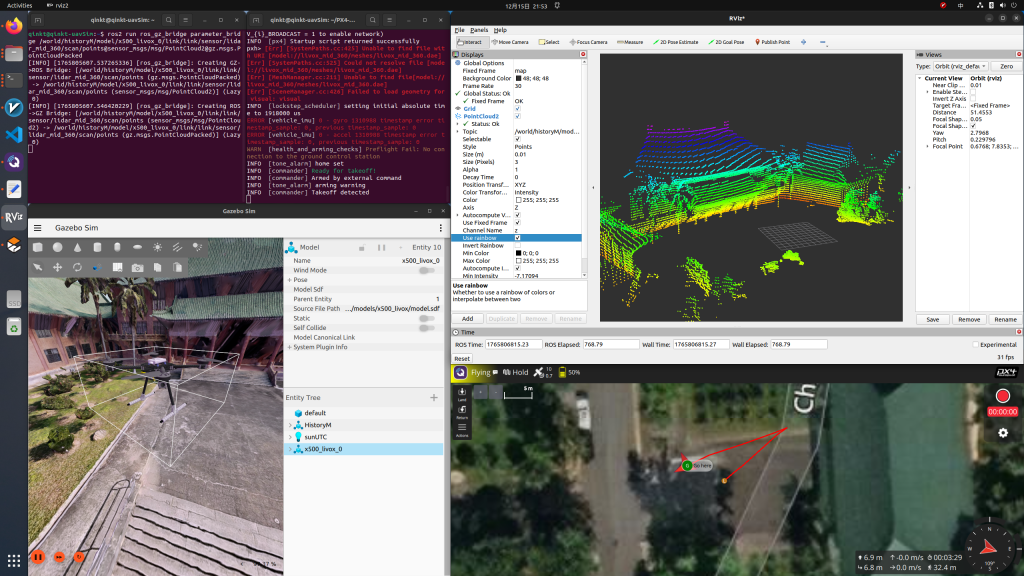
ros2 run ros_gz_bridge parameter_bridge /world/historyM/model/x500_livox_0/link/lidar_link/sensor/lidar/scan/points@sensor_msgs/msg/PointCloud2@gz.msgs.PointCloudPacked
ros2 run ros_gz_bridge parameter_bridge /depth_camera/points@sensor_msgs/msg/PointCloud2@gz.msgs.PointCloudPacked
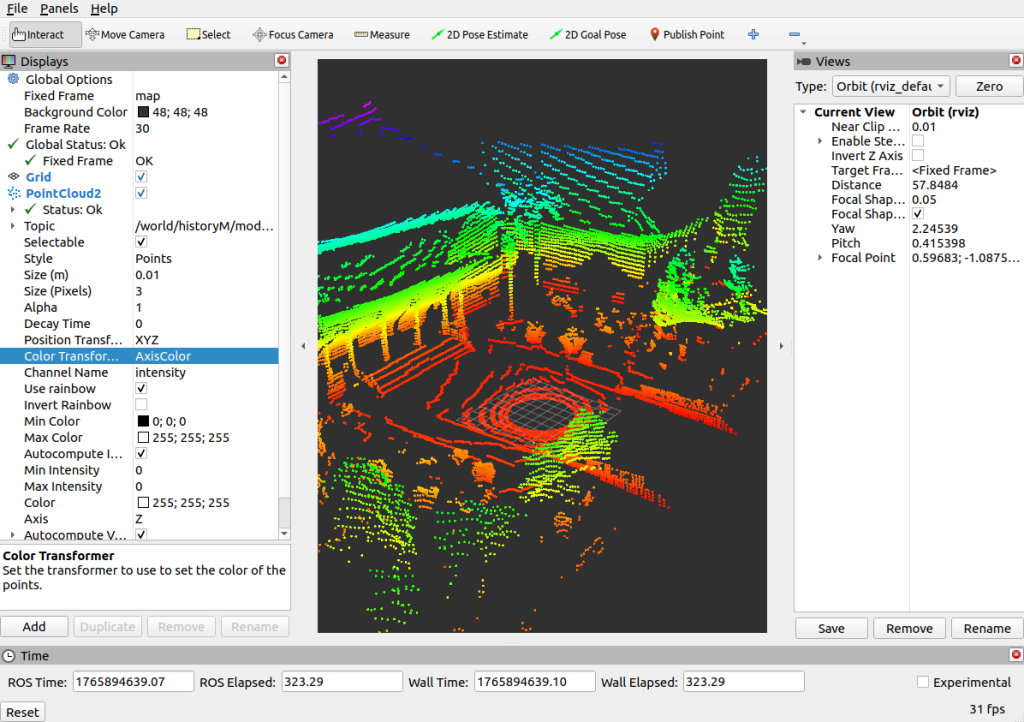
ros2 run ros_gz_bridge parameter_bridge /world/historyM/model/x500_livox_0/link/camera_link/sensor/IMX214/image@sensor_msgs/msg/Image@gz.msgs.Image启动rviz2之后如果fixed_frame不正常(有点玄学),需要手动发布静态坐标转换,ros2 topic echo /world/historyM/model/x500_livox_0/link/lidar_link/sensor/lidar/scan/points这样的指令可以获取话题的frame_id,其实就是在gazebo右下角的传感器路径。发布两个变换,要重新定义相对坐标,这里的base_link相当于是新建的坐标系,名称无所谓,也可以用map等。
ros2 run tf2_ros static_transform_publisher 0 0 0.26 0 0 0 base_link x500_livox_0/lidar_link/lidar
ros2 run tf2_ros static_transform_publisher .12 .03 .242 0 0 0 base_link x500_livox_0/camera_link/StereoOV7251呃,这图是还没加深度相机时候的截图……哦雷达模型也因为路径写错隐藏了。反正后来是正常的。
关于仿真器坐标系和静态tf的问题,附在github上发的神秘仙家issue:https://github.com/PX4/PX4-Autopilot/issues/26129#event-21618582560
睦头:从来没有觉得搞仿真开心过……



主播主播,你的仿真虽然很强,但是xml含量太高了,能不能写个宝宝图形化配置工具开源一下(天子天子图.jpg)。还有主播你的issue虽然很有礼貌但是有语病和语法错误,八六要来当键盘侠了
github上找XTdrone去(虽然他们版本比较老)恼。kt的英语怎么办,只有天知道
还有我可以提供酸奶建模(bushi
那只能把机载华农学士盒提到机载睦子米前做了
评价为夯!